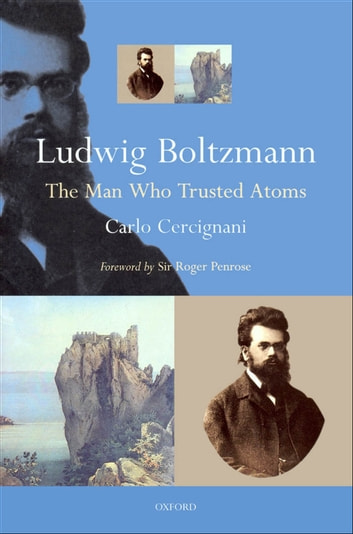
Carlo Cercignani (1939 - 2010) est un spécialiste de la théorie cinétique des gaz. On lui doit notamment la preuve du théorème H de Boltzmann pour les gaz polyatomiques. Sa conjecture sur la convergence exponentielle à l'équilibre dans l'équation de Boltzmann a été résolue par Cédric Villani (1973 - ), ce qui a contribué à sa Médaille Fields en 2010. Carlo Cercignani a publié en 1998 une biographie scientifique de Ludwig Boltzmann (1944 - 1906), rééditée en 2010. Cette biographie est particulière car écrite par un mathématicien de la physique, qui n'hésite pas à y incorporer des équations et des raisonnements entiers. Cercignani a manifestement fouillé son sujet, et ce qu'il nous révèle vaut le détour. On y découvre un Ludwig Boltzmann traversant une vie faite d'abord d'une période faste et brillante puis d'une autre torturée et sombre qui le mènera au tragique, juste après l'année miraculeuse d'Albert Einstein (1879 - 1955). Boltzmann était en avance sur son temps. Il a par exemple formulé la thermodynamique avant Rudolf Clausius (1822 - 1888), et l'ensemble canonique de la mécanique statistique avant Willard Gibbs (1839 - 1903) ! Boltzmann était également en avance sur les idées d'Andrey Markov (1856 - 1922) pour l'évolution d'une distribution de probabilité, sur celles de Norbert Wiener (1894 - 1964) pour le mouvement Brownien, sur celles de Claude Shannon (1916 - 2001) pour la théorie de l'information, etc. Boltzmann était célébré et respecté de son vivant, mais aussi controversé, mal lu, mal compris, y compris par les plus grands. Cercignani prend le temps de restituer, dans la mesure du possible, les complexions, scientifiques, sociologiques, psychologiques, et philosophiques, de la vie et de l'oeuvre de Boltzmann, et émaille son texte d'un grand nombre de citations éclairantes, parfois déroutantes. Les scientifiques, y compris les plus illustres, sont avant tout des humains, et cela est d'une importance première pour le destin de leurs idées. Boltzmann peut être considéré, plus encore que James Clerk Maxwell (1831 - 1879), comme un pionnier des probabilités, reliant discret et continu, percevant le rôle de la combinatoire dans la mécanique du désordre, et se situant dans l'intégration et le dépassement d'à la fois Jacques Bernoulli (1654 - 1705), Daniel Bernoulli (1700 - 1782), et Pierre-Simon de Laplace (1749 - 1827). Boltzmann forge tumultueusement la physique statistique, cinquante ans avant que les mathématiques n'accouchent enfin d'une théorie des probabilités puissante. Boltzmann est sans conteste l'un des plus grands mécaniciens du désordre, à la recherche des lois de la nature, comme Charles Darwin (1809 - 1882), qu'il admirait.
« By the study of Boltzmann I have been unable to understand him. He could not understand me on account of my shortness, and his length was and is an equal stumbling-block to me. Hence I am very much inclined to join the glorious company of supplanters and to put the whole business in about six lines. »
Extrait d'une lettre de James Clerk Maxwell à Peter Guthrie Tait, vers 1873.
« The Boltzmann is magnificent. I have almost finished it. He is a masterly expounder. I am firmly convinced that the principles of the theory are right, which means that I am convinced that in the case of gases we are really dealing with discrete mass points of definite finite size, which are moving according to certain conditions. Boltzmann very correctly emphasizes that the hypothetical forces between the molecules are not an essential component of the theory, as the whole energy is of the kinetic kind. This is a step forward in the dynamical explanation of physical phenomena. »
Extrait d'une lettre d'Albert Einstein à Mileva Maric, vers 1900.
« Boltzmann had no inhibitions whatever about showing his enthusiasm while he spoke, and this naturally carried his listeners along. He was also very fond of introducing remarks of an entirely personal character into his lectures—I particularly remember how in describing the kinetic theory of gases, he told us how much difficulty and opposition he had encountered because he had been convinced of the real existence of atoms, and how he had been attacked from the philosophical side, without always understanding what the philosophers had against him. [...] (Anton) Lampa (1868 - 1938) was an excellent experimentalist, but as an enthusiastic follower of Mach, was rather sceptical of the modern development of physics. »
Extrait d'un texte de Lise Meitner (1878 - 1968), étudiante de Boltzmann devenue ensuite célèbre pour la découverte de la fission nucléaire, a suivi ses cours entre 1902 et 1906. De l'atomisme du dix-neuvième siècle à la fission atomique du vingtième siècle !

Ci-dessus, une machine de Boltzmann maison : un bocal contenant des billes de couleurs différentes pour visualiser une distingabilité. La configuration de gauche est assez ordonnée. L'agitation conduit à la configuration de droite, désordonnée. Peut-on retrouver la configuration de départ en agitant encore ? C'est peu probable en temps court, et cela vient de la combinatoire, qui génère des possibles en très grand nombre. C'est ce qu'a compris Ludwig Boltzmann, et c'est ce qu'a exploré ensuite son étudiant Paul Ehrenfest avec son fameux modèle d'urnes. Cette idée a également conduit Boltzmann à l'hypothèse ergodique, qui fonde la théorie ergodique, explorée ensuite par Henri Poincaré et bien d'autres. On m'a signalé qu'un bocal du même genre figure dans des romans de Jasper Fford : entroposcope de Mycroft, fait de lentilles et de grains de riz.
Une lecture complémentaire est la partie III « La physique du XIXe siècle à l'épreuve de l'irréversibilité », du livre « Le facteur temps ne sonne jamais deux fois » d'Étienne Klein, paru en 2007, et réédité en 2016. On y découvre notamment que Max Planck s'est intéressé au rayonnement du corps noir à la recherche d'une approche alternative à celle de Boltzmann sur l'irréversibilité, qu'il n'a pas trouvé, mais cela lui a fait découvrir la quantification.
La physique développée par Boltzmann est ample et variée, et ne se résume pas à sa fameuse équation d'évolution. À titre personnel, j'apprécie particulièrement sa vision sur le rôle de la combinatoire, sur le rôle des modèles discrets en général, et par ailleurs, dans une autre direction, sa déduction magistrale, à partir de la thermodynamique, de la loi en $T^4$ de Josef Stefan (1835 - 1883) sur le rayonnement du corps noir. Cela a beaucoup séduit l'étudiant épris de physique que j'ai été dans mes jeunes années. Voici enfin un texte d'exposition en rapport avec Boltzmann, que j'ai eu le plaisir de rédiger, à Dauphine, il y a déjà dix ans :
- From Boltzmann to random matrices and beyond
Annales de la Faculté des Sciences de Toulouse XXIV (4) 641-689 (2015)
arXiv:1405.1003